Cycle de collage avec 3 robots — GMP1 (2023)
En première année de BUT, j’ai découvert ROBOGUIDE, un logiciel de programmation produit par FANUC pour leurs robots. À travers les TP, j’ai appris à m’en servir pour réaliser des actions simples de prise et de dépose, tout en effectuant des boucles pour les décalages.
Au deuxième semestre, un travail de développement d’une cellule robotisée nous a été donné pour appliquer ce que l’on a appris en TP. Dans ce projet, l’utilisation de plusieurs robots a été une première pour moi.
Le travail réalisé n’est pas parfait, notamment sur l’optimisation du temps de cycle et sur la qualité des mouvements (nombre de rotations excessif de la pince). Néanmoins, je reste fier de ce premier projet.
Fabrication d’un robot scara avec des Makeblocks — GMP2 (2024)
Au second semestre de ma deuxième année, dans le parcours SNRV, j’ai réalisé en groupe la conception, la fabrication et la programmation d’un robot scara à l’aide de Makeblock (similaire à des Meccano).
Pour réaliser ce projet, nous ne pouvions prendre que deux moteurs pas à pas et un servo moteur. Nous avons alors décidé d’utiliser les moteurs pas à pas pour bouger les deux pivots du robot, et le servo moteur pour réaliser la translation dans la hauteur.
La difficulté est de transformer un mouvement de rotation du servo moteur en translation. Notre première idée était une crémaillère, mais il n’en existe pas dans la gamme de Makeblock. La solution que l’on a retenue a été inspirée par la géométrie d’un robot « pentagone ».
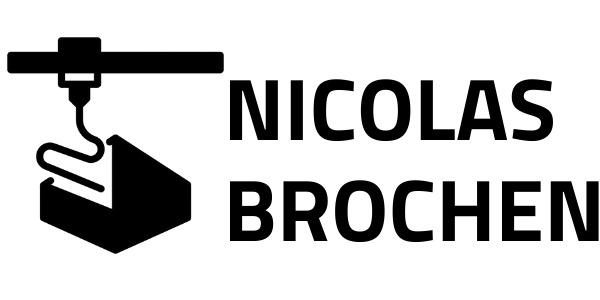
Robot « pentagone »
Dans un premier temps, le robot a été modélisé sur SolidWorks, puis nous sommes passés à l’assemblage des composants. Durant le montage, des ajustements ont été nécessaires car la quantité de pièce était insuffisante comparé celle requise dans le model 3D. Un autre élément n’avait pas été anticipé, la nécessité d’ajouter un contrepoids.
Pour piloter le robot, j’ai programmé le MGD et MGI sur Arduino.
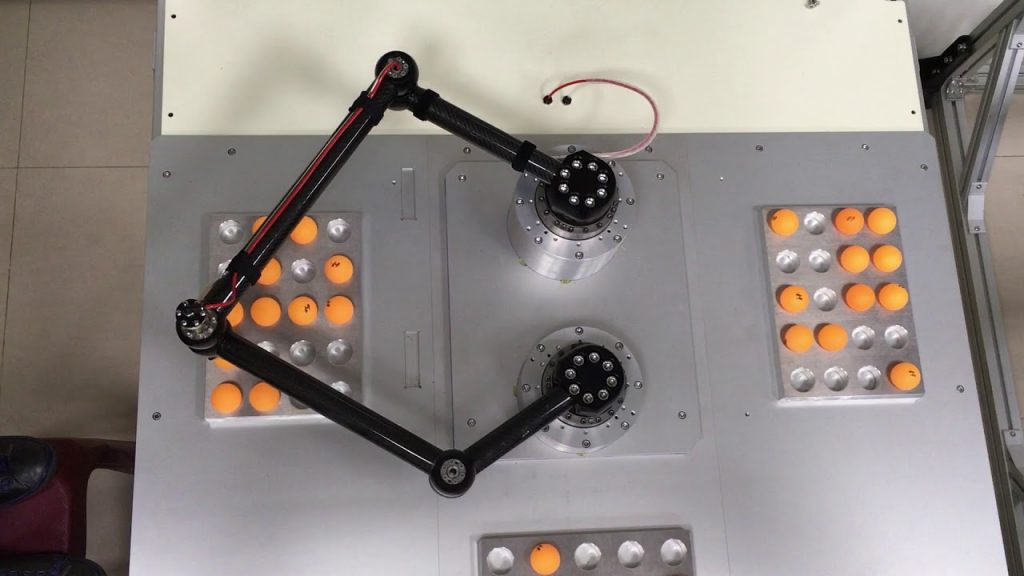
Rendu de notre robot scara
Optimisation d’un cycle d’usinage — GMP3 (2025)
L’objectif de ce projet est de réaliser l’usinage d’une pièce en tournage avec un seul robot. La pièce à usiner est composée de deux phases, chacune dans un sens de la pièce. Il faudra alors retourner la pièce pour la deuxième phase.
La solution que j’ai choisie est d’ajouter un porte outil double. Ainsi, j’ai mis une pince concentrique pour la prise du brut, et un pince parallèle pour retourner la pièce et l’évacuer.
Pour l’orientation des deux outils, j’ai décidé de les orienter à 90°. La pince parallèle est dans la prolongation du bras pour faciliter la rotation de la pièce entre la première et deuxième grâce à la 6ème rotation du robot.
Pour que le temps du cycle soit le plus fidèle à la réalité, j’ai renseigné les différents payloads (charges utiles).
Calibration d’un robot UR (GMP3)
Pour ma 3ème année de BUT, dans mon parcours SNRV, avec un camarade nous avons choisi de réaliser le projet de calibration du robot UR. Un projet qui prendra lieu sur les deux semestres.
L’objectif est assez clair, calibrer un robot UR pour que sa position dans l’espace corresponde à sa position calculée.
Lorsque l’on enregistre un point de passage, le contrôleur récupère les données angulaires de chaque liaison ainsi que les coordonnées du point. Cependant la position enregistrée ne correspond pas à la position réelle. La différence de positions est due à la précision des moteurs mais également à la définition des longueurs physiques séparant les différents axes. Ces longueurs sont renseignées par le constructeur. À la création d’un programme, le fichier généré commence par définir ces longueurs.
Pour calibrer le robot, il faut calculer ces longueurs de faon précise. Pour cela, nous utilisons une plaque de calibration sur laquelle le robot sera fixé et où il y a 57 cylindres. On a mesuré avec précision, sur une MMT, la position du centre de chaque cylindre par rapport au repère de la planche, soit le repère du robot.
On va par la suite, enregistrer la position de l’extrémité du robot dans chaque cylindre, ce qui nous permettra de calculer les écarts de longueurs entre chaque axe. Les calculs ont été effectués par notre programme python.
